국내특허(10-2141417), 2020-07-30, (출원번호: 10-2018-0049970), 2018-04-30.
서지정보
| 서지정보 | |
|---|
| IPC | - H02P 5/68(2006.01.01)- B64U 10/80(2023.01.01)- B64U 50/19(2023.01.01) |
| CPC | - H02P 5/68(2013.01)- B64U 10/80(2025.05)- B64U 50/19(2025.05)- Y02T 50/60(2020.08) |
| 출원번호(일자) | 1020180049970 (2018.04.30) |
| 출원인 | 경북대학교 산학협력단 |
| 번역문제출일자 | |
| 등록번호(일자) | 1021414170000 (2020.07.30) |
| 공개번호(일자) | 1020190125760 (2019.11.07)전문다운 |
| 공고번호(일자) | (2020.08.05)전문다운 |
| 국제출원번호(일자) | |
| 국제공개번호(일자) | |
| 우선권정보 | |
| 법적상태 | 등록 |
| 심사진행상태 | 등록결정(일반) |
| 심판사항 | |
| 구분 | 국내출원/신규 |
| 원출원번호(일자) | |
| 관련 출원번호 | |
| 심사청구여부(일자) | Y(2018.04.30) |
| 심사청구항수 | 4 |
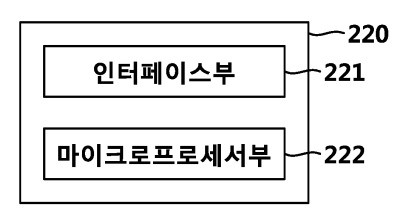
일 실시예에 따른 복수 개의 모터를 포함하는 무인 비행체(Unmanned Aerial Vehicle: UAV)의 모터 속도 제어 장치는 비행 제어기로부터 PWM(Pulse Width Modulation) 신호를 수신하고 상기 복수 개의 모터에 듀티 사이클을 전달하는 인터페이스부 및 상기 PWM(Pulse Width Modulation) 신호 값를 이용해서 듀티 사이클을 계산하고, 배터리의 전압을 고려해서 상기 듀티 사이클을 보정하는 마이크로프로세서부를 포함한다.
인명정보
출원인
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 경북대학교 산학협력단 (220040016844)- 사업자번호 | 대구광역시 북구... |
발명자
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 이우진 | 대구광역시 수성구... |
| 2 | 김용덕 | 대구광역시 북구... |
| 3 | 류민지 | 대구광역시 동구... |
| 4 | 이성희 | 대구광역시 북구... |
| 5 | 김덕엽 | 대구광역시 수성구... |
| 6 | 윤보람 | 대구광역시 서구... |
대리인
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 김종선 (920030002489) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
| 2 | 이형석 (920030003344) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
최종권리자
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 경북대학교 산학협력단 | 대구광역시 북구... |
등록 이후 발명자 정보
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 이우진 | 대구광역시 수성구... |
| 2 | 김용덕 | 대구광역시 북구... |
| 3 | 류민지 | 대구광역시 동구... |
| 4 | 이성희 | 대구광역시 북구... |
| 5 | 김덕엽 | 대구광역시 수성구... |
| 6 | 윤보람 | 대구광역시 서구... |
등록 이후 대리인 정보
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 김종선 (920030002489) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
| 2 | 이형석 (920030003344) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
지정국
인용/피인용
피인용
청구항
| 번호 | 청구항 |
|---|
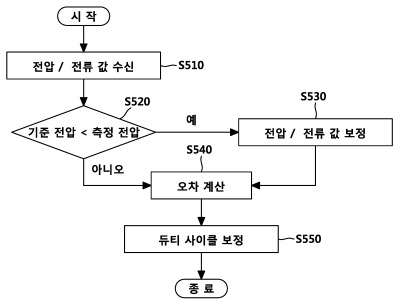
| 1 | 복수 개의 모터를 포함하는 무인 비행체(Unmanned Aerial Vehicle: UAV)의 모터 속도 제어 장치에 있어서, 비행 제어기로부터 PWM(Pulse Width Modulation) 신호를 수신하고 상기 복수 개의 모터에 듀티 사이클을 전달하는 인터페이스부; 및 상기 PWM(Pulse Width Modulation) 신호 값를 이용해서 듀티 사이클을 계산하고, 배터리의 전압을 고려해서 상기 듀티 사이클을 보정하는 마이크로프로세서부 를 포함하고 상기 마이크로프로세서부는, 상기 듀티 사이클의 보정은 배터리에서 측정된 전압 및 전류 값을 수신하여 상기 전압이 미리 정해진 기준전압보다 큰 경우, 보정된 전압 및 전류 값을 생성하고, 전류 값의 오차를 반영한 PID 제어를 수행하여 보정��하고 상기 보정된 듀티 사이클을 통해 실제 모터에 적용되는 상기 듀티 사이클을 계산하는 것을 특징으로 하는 무인 비행체의 모터 속도 제어 장치. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제1항에 있어서, 상기 무인 비행체의 모터 속도 제어 장치는, 상기 무인 비행체의 전자 변속기에 펌웨어 형태로 설치되는 것을 특징으로 하는 무인 비행체의 모터 속도 제어 장치. |
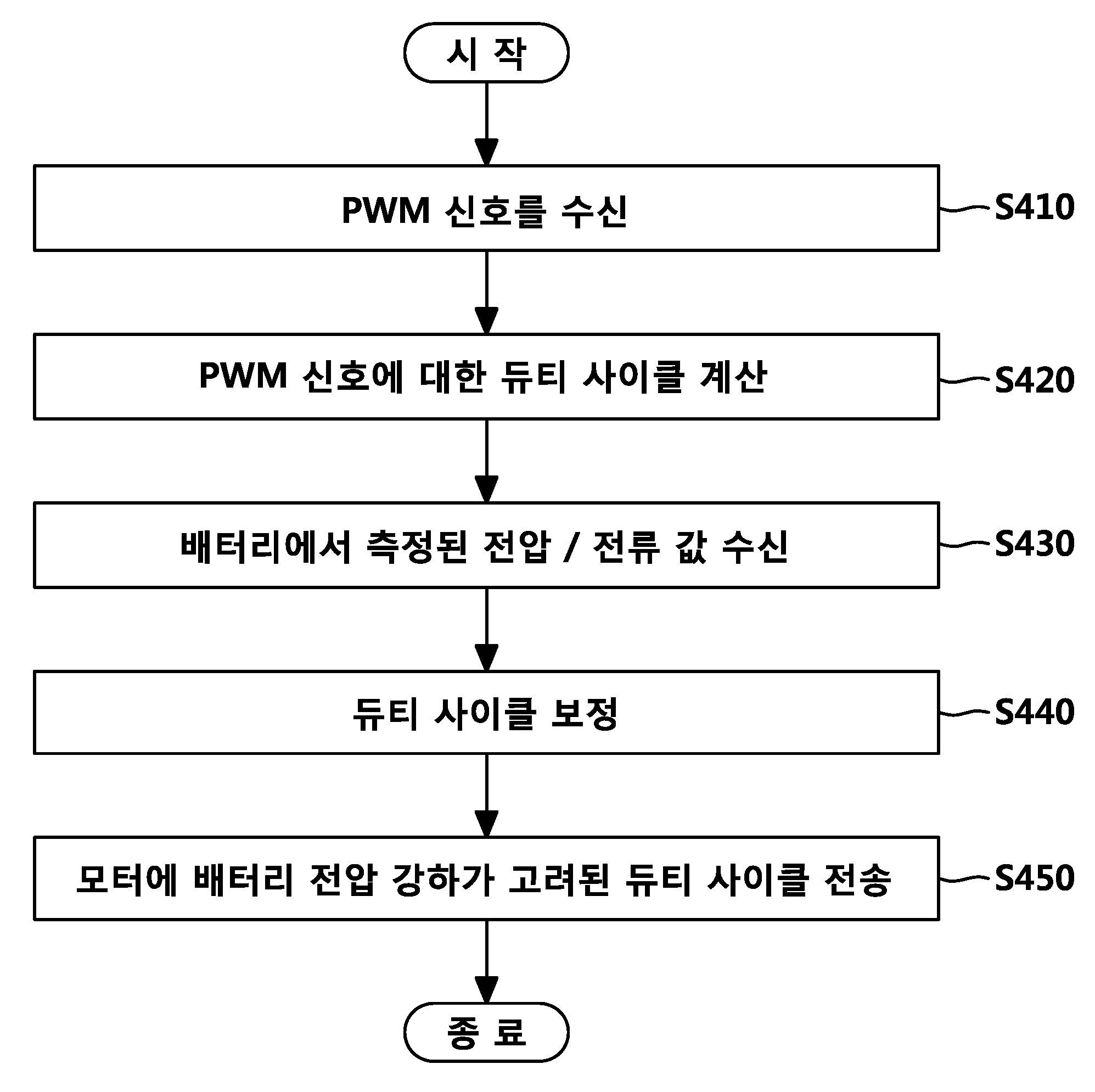
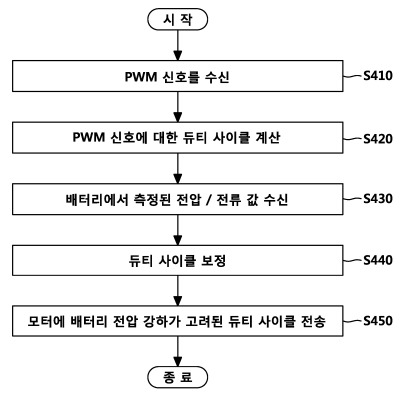
| 5 | 복수 개의 모터를 포함하는 무인 비행체(Unmanned Aerial Vehicle: UAV)의 모터 속도를 제어하는 방법에 있어서, 비행 제어기로부터 PWM(Pulse Width Modulation) 신호를 수신하는 단계; 상기 PWM 신호에 대한 듀티 사이클을 계산하는 단계; 배터리에서 측정된 전압/전류 값을 수신하는 단계; 상기 측정된 전압/전류 값을 고려해서 상기 계산된 듀티 사이클을 보정하는 단계; 상기 보정된 듀티 사이클을 통해 실제 모터에 적용되는 듀티 사이클을 계산하는 단계; 및 상기 복수 개의 모터에 상기 보정된 듀티 사이클을 전달하는 단계 를 포함하고, 상기 듀티 사이클을 보정하는 단계는, 상기 배터리의 전압 및 전류 값을 수신하여 상기 전압 값이 미리 정해진 기준 전압 값보다 큰 경우, 보정된 전압 및 전류 값을 생성하고, 전류 값의 오차를 반영한 PID 제어를 수행하여 듀티 사이클을 보정하는 것을 특징으로 하는 무인 비행체의 모터 속도 제어 방법. |
| 6 | 삭제 |
| 7 | 삭제 |
| 8 | 제5항에 있어서, 상기 무인 비행체의 모터 속도 제어 방법은, 상기 무인 비행체의 전자 변속기에 펌웨어 형태로 설치되는 것을 특징으로 하는 무인 비행체의 모터 속도 제어 방법. |
패밀리정보
통합심사정보
| 순번 | 패밀리번호 | 출원일자 | 국가코드 | 국가명 | 종류 |
|---|
| 데이터가 존재하지 않습니다. | | | | | |
DOCDB 패밀리정보
| 순번 | 패밀리번호 | 출원일자 | 국가코드 | 국가명 | 종류 |
|---|
| 데이터가 존재하지 않습니다. | | | | | |
국가연구개발사업
| 순번 | 연구부처 | 주관기관 | 연구사업 | 연구과제 |
|---|
| 1 | 과학기술정보통신부 | 경북대학교 산학협력단 | SW전문인력역량강화(R&D) | SW중심대학(경북대) |
대표도면
도면1
도면2

도면3
도면4
도면5